I’ve started a new project and it’s called Customelon. It provides an easy way to quickly find accurate customs duties for anything you’d want to ship to The Bahamas.
Continue reading “New Project: Customelon”TIL: macOS Ships with an Excellent Profiler
…and a little about the impact of the D garbage collector.
Continue reading “TIL: macOS Ships with an Excellent Profiler”How to Provide Managed ChatGPT for Your Team
Update 2024-10-21: Just use OpenAI’s ChatGPT Team to get a much better experience than the one I setup below.
Why would you want to manage ChatGPT access for your team? There are a few reasons:
- Priority access to the service during busy periods. No more being unable to login to free accounts at https://chat.openai.com/ during the work day.
- Assurance that your team’s prompts aren’t being used to train OpenAI’s models.
Radiometric Response Functions for the Canon EOS Rebel SL1
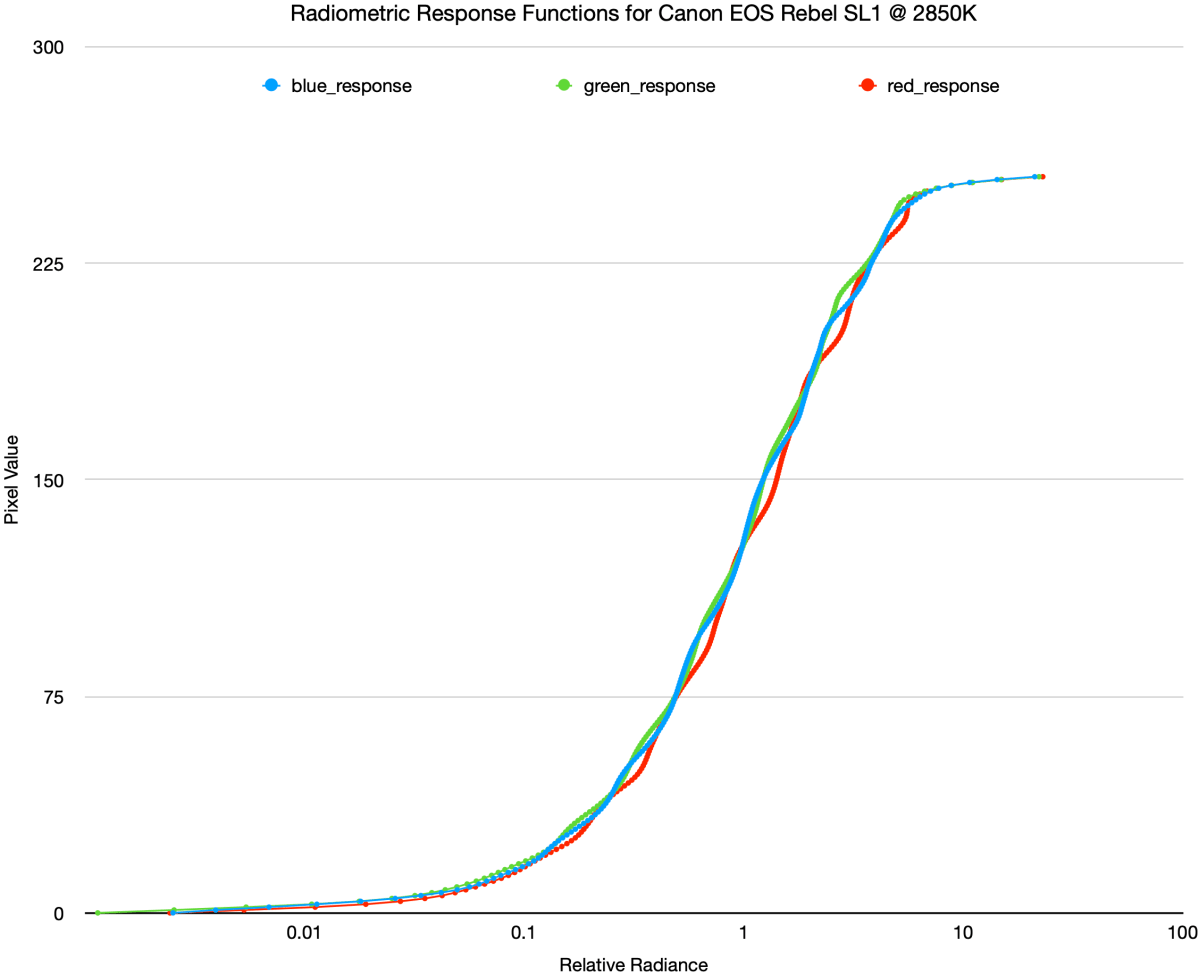
In my last entry I mentioned that I would generate radiometric response functions for my Canon EOS Rebel SL1. Here they are as promised:
Continue reading “Radiometric Response Functions for the Canon EOS Rebel SL1”Radiometric Response Functions in OpenCV

I recently started reading up on how to construct composite high-dynamic-range (HDR) images programmatically. The reason why is because I had been thinking about why traditional cameras have dropped the ball on in-camera HDR when compared to their mobile phone brethren (that’s a thought for another day). There are a number of approaches for building HDR images in computer vision literature. While they differ in how to produce their final output, where they are alike is in their need for the radiometric response function of the imaging pipeline creating the images for the HDR algorithm.
Continue reading “Radiometric Response Functions in OpenCV”Lip Colour Finder – Control Through Systemd
I recently configured Lip Colour Finder to utilize systemd to manage its components. This post will be a small nugget on that process as opposed to the usual deep-dive. Continue reading “Lip Colour Finder – Control Through Systemd”
Lip Colour Finder – Profiling for Speedup
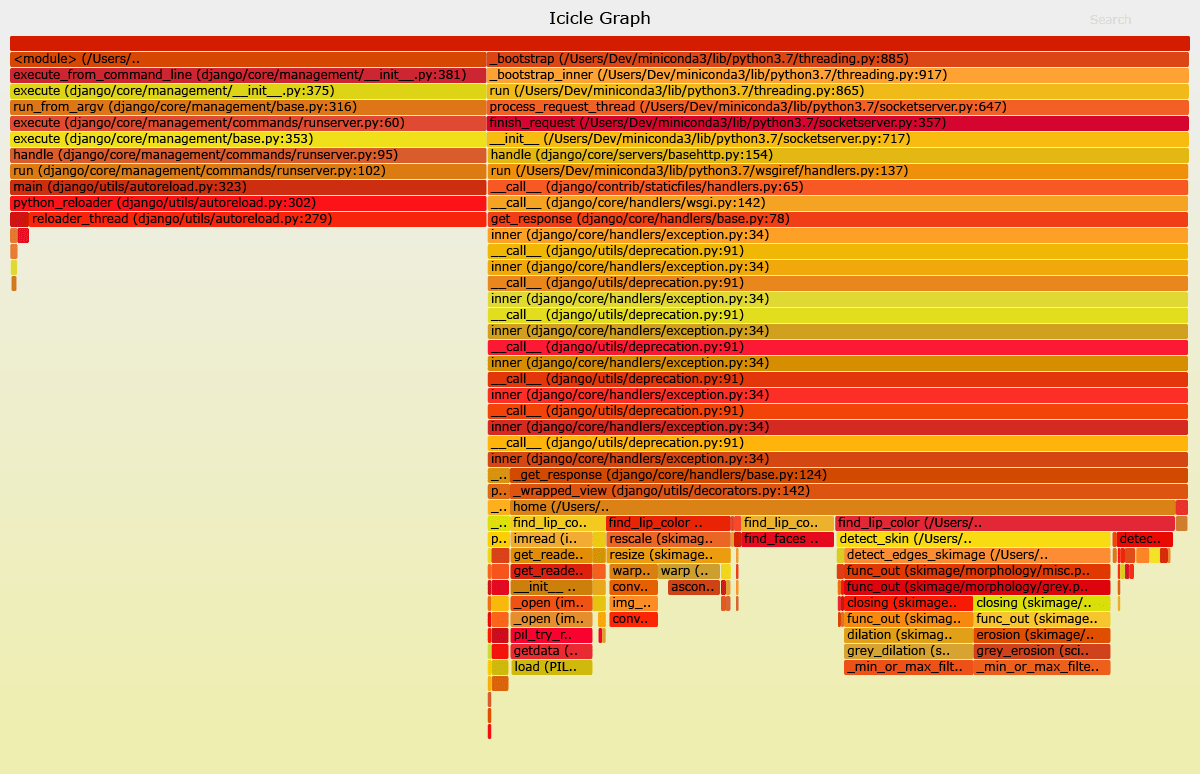
I’ve been working to improve the turnaround time for Lip Colour Finder results. In order to find the areas of my code most amenable to tweaking I turned to profiling. Continue reading “Lip Colour Finder – Profiling for Speedup”
Project: Lip Colour Finder
Overview
Lip Colour Finder accepts an uploaded image of a face and returns lipstick recommendations based on the colour of the lips found on that face.


Google transitfeed Library Quickstart
Documentation for the useful Google transitfeed library is light on the ground. This post will take you from 0 to GTFS feed in no time flat.
Continue reading “Google transitfeed Library Quickstart”First Experiences with Scikit-Learn
I recently made a submission to one of Kaggle’s introductory machine learning competitions. The Python code that I wrote was built upon code I wrote for the Coursera Machine Learning by Stanford class in GNU Octave. For the course we put together implementations of common machine learning models, one of those being the logistic regression model I wanted to use for the aforementioned Kaggle competition. I hadn’t written code in Python in a while and felt that porting those models from GNU Octave to Python/Pandas/NumPy would be a great way of getting familiar with the language again. Continue reading “First Experiences with Scikit-Learn”
